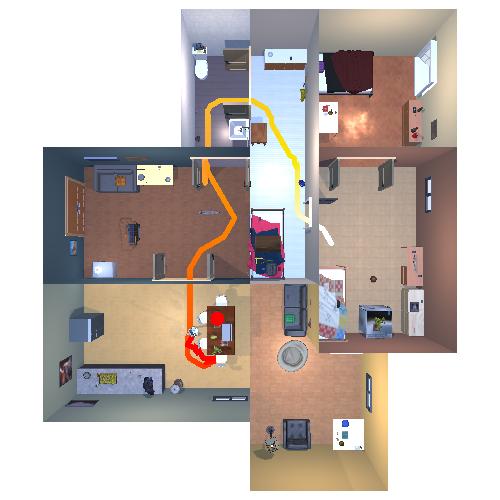
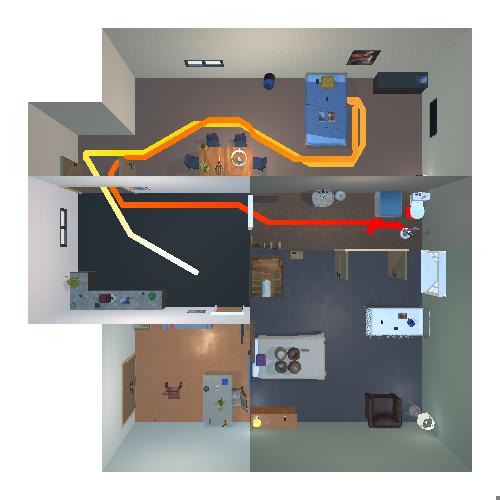
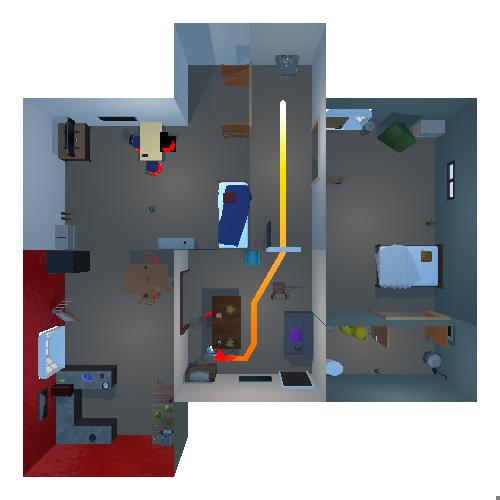
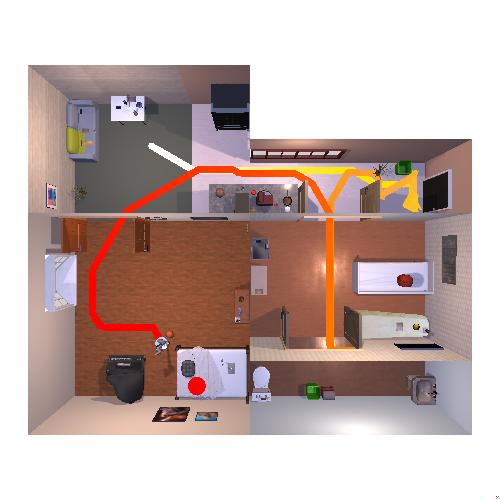
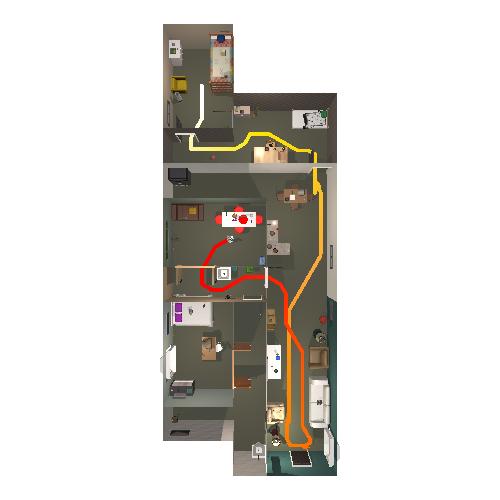
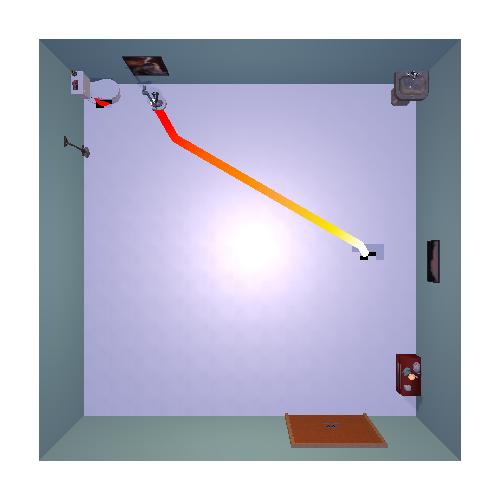
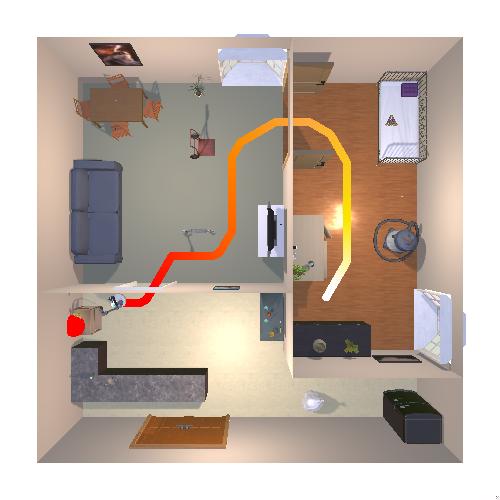
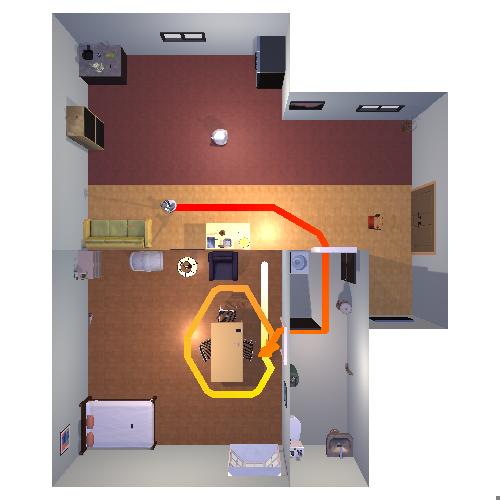
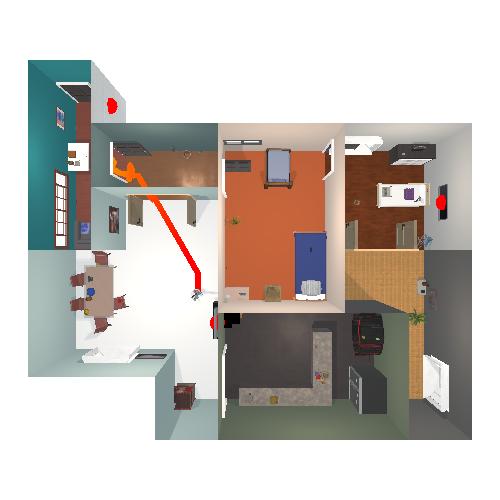
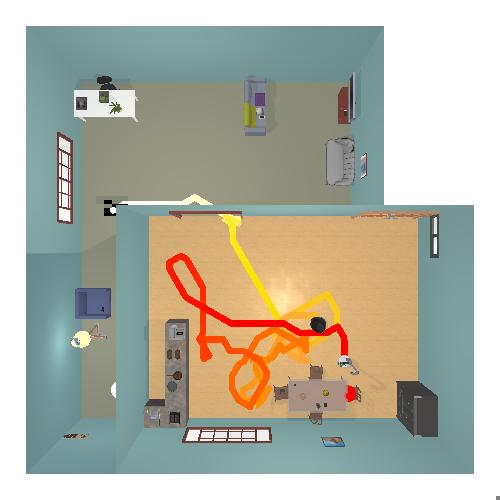
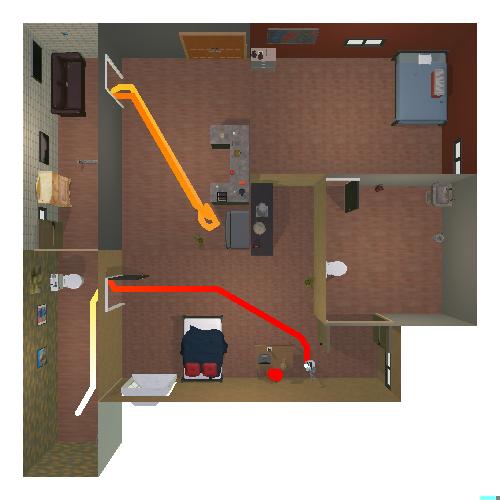
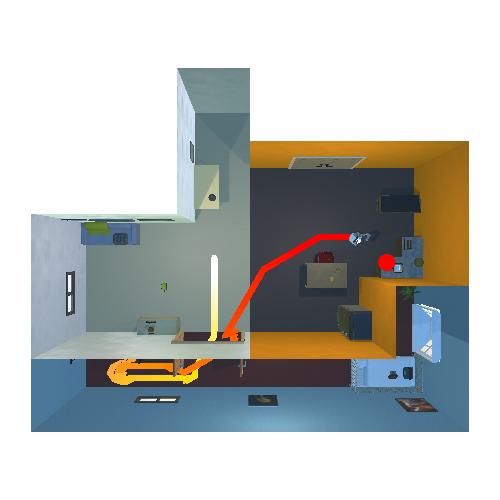
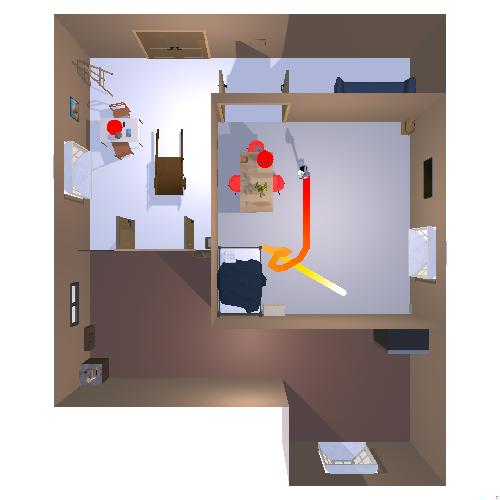
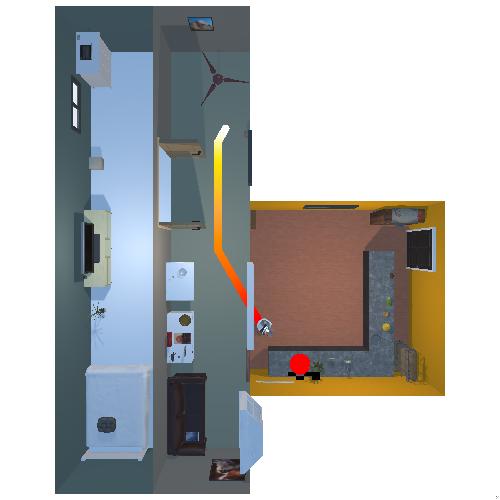
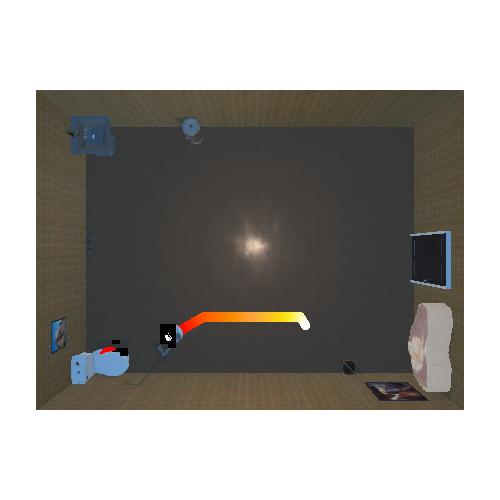
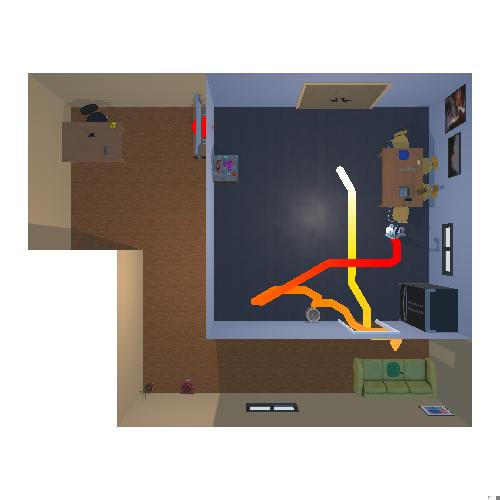
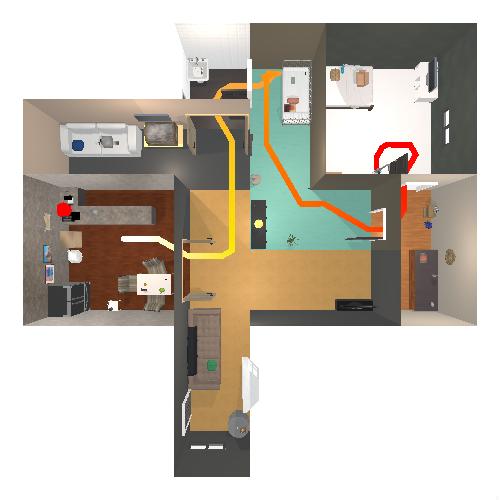
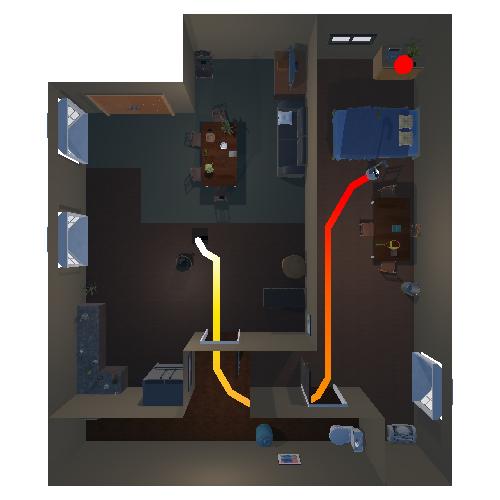
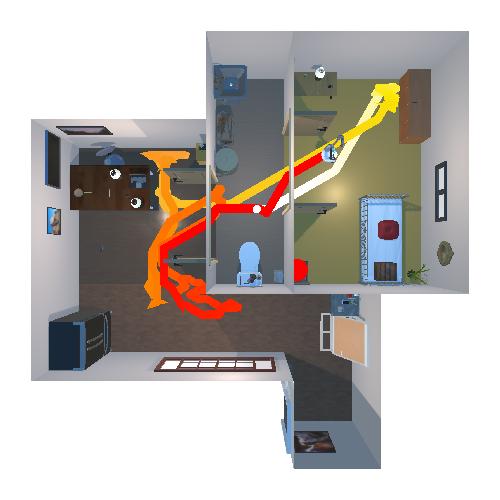
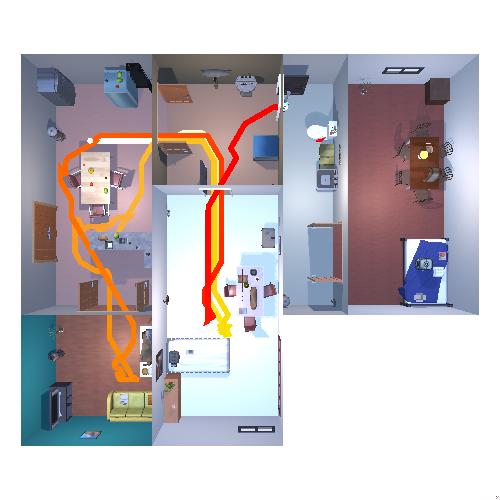
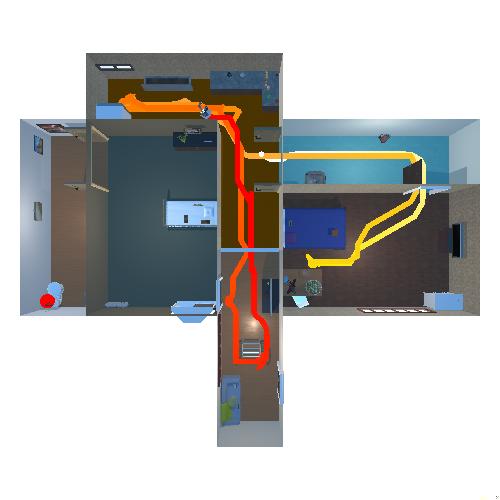
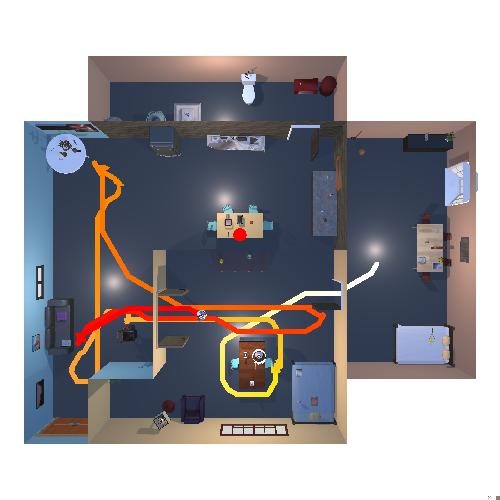
This figure shows top-down visualizations of our agent's object-navigation
trajectories on our validation set. Here we list all 200 examples within the validation set using our SPOC model
trained with ground-truth detections. The agent's path is visualized as a line that goes from white (episode start to red episode end).
We also add red markers to indicate the location of objects of the goal object category.

Target: vase, success
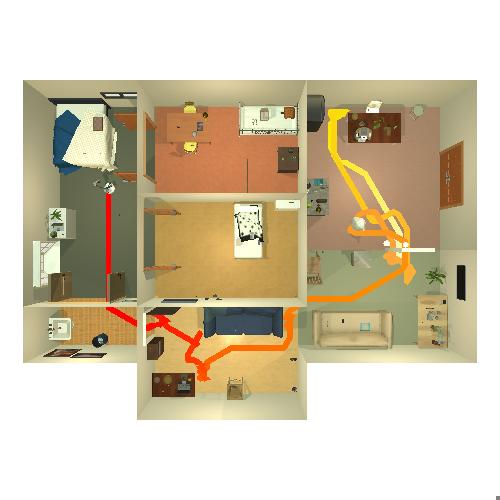
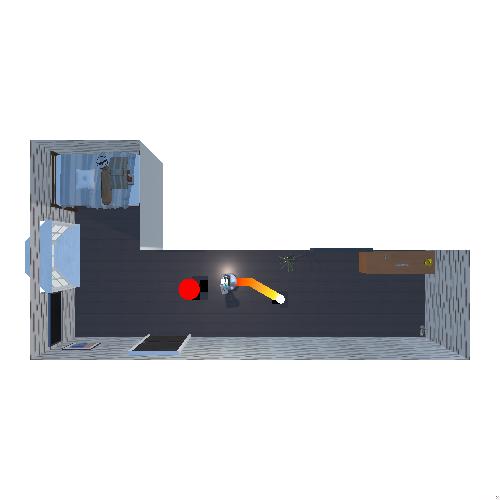
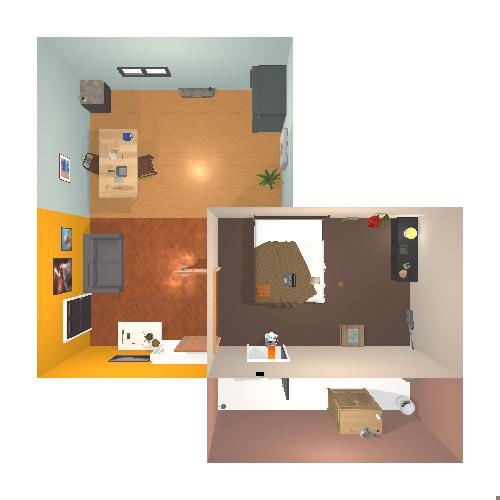
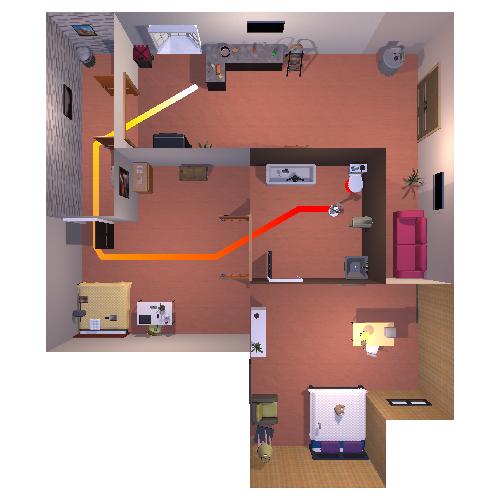
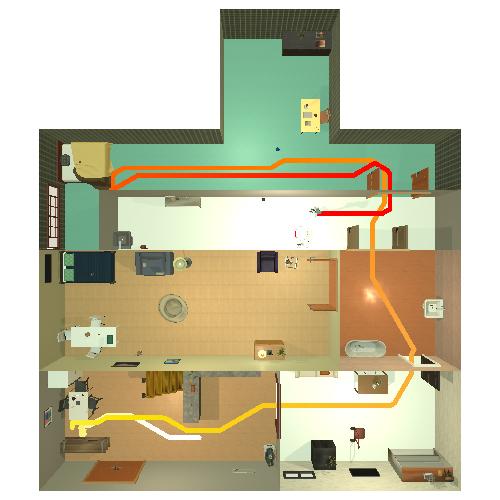
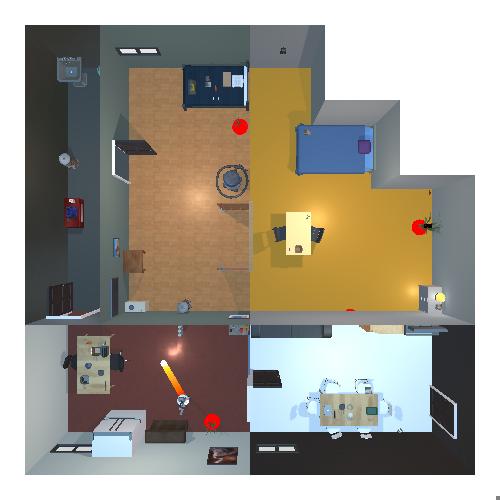
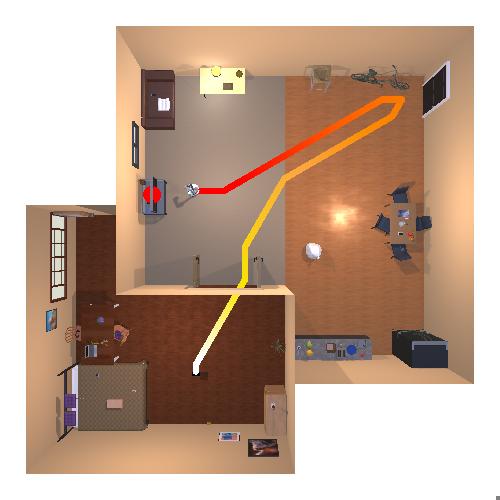
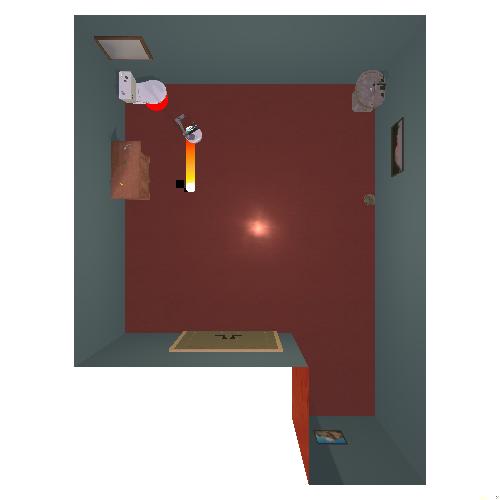
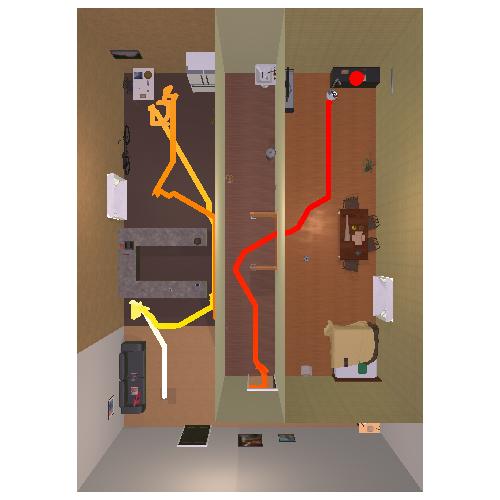
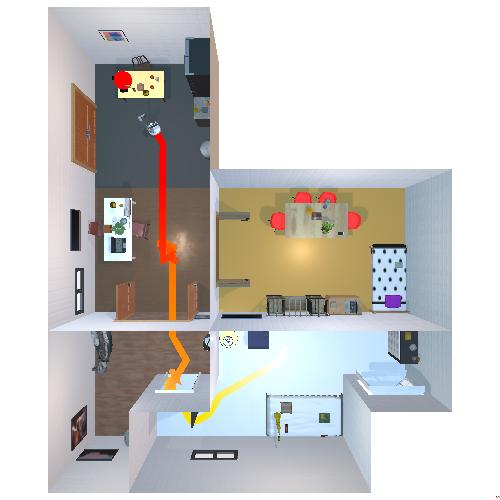
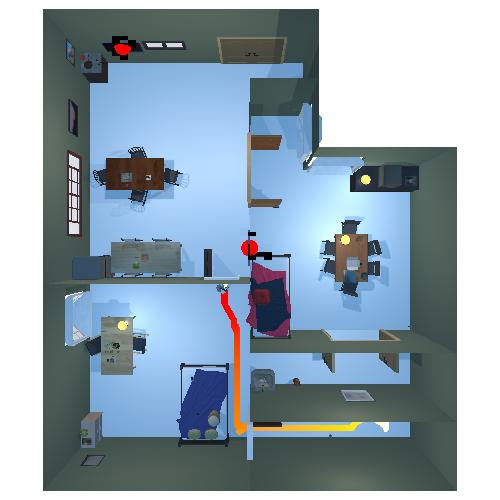
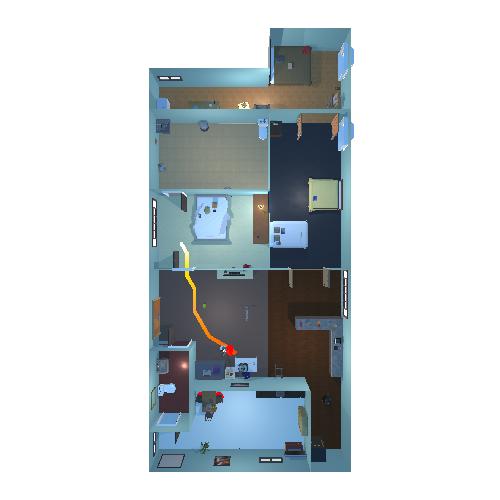
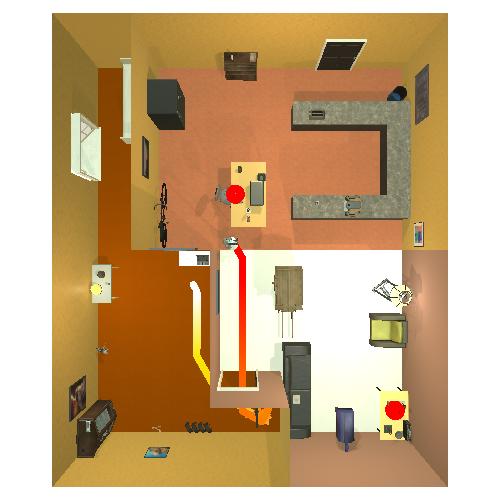
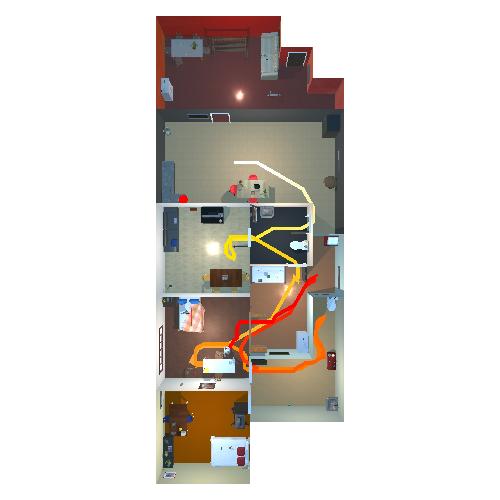
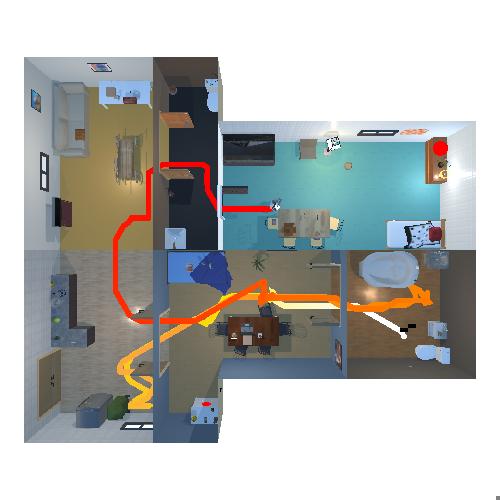
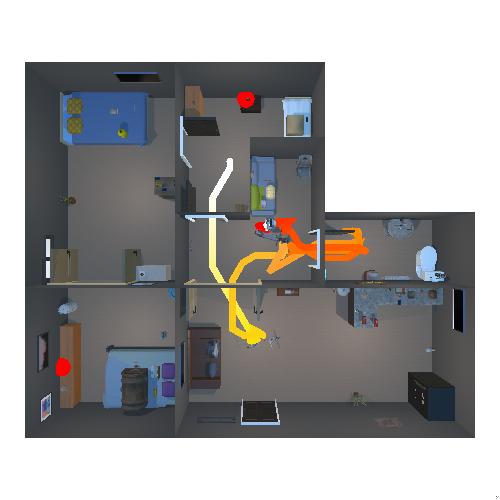
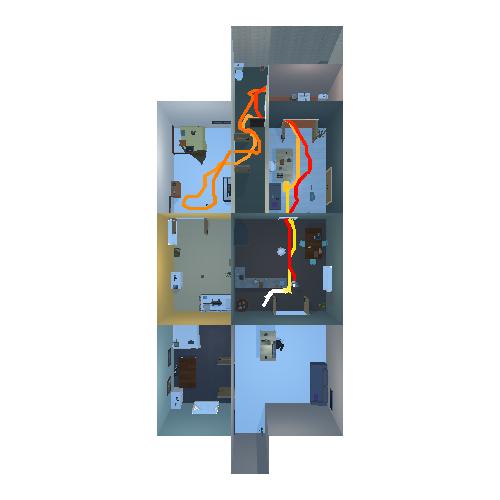
Target: bed, success

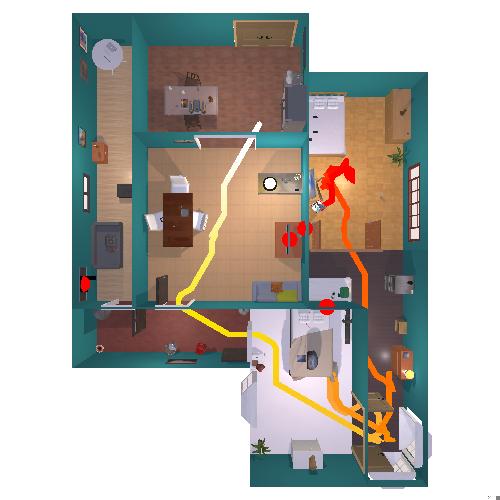
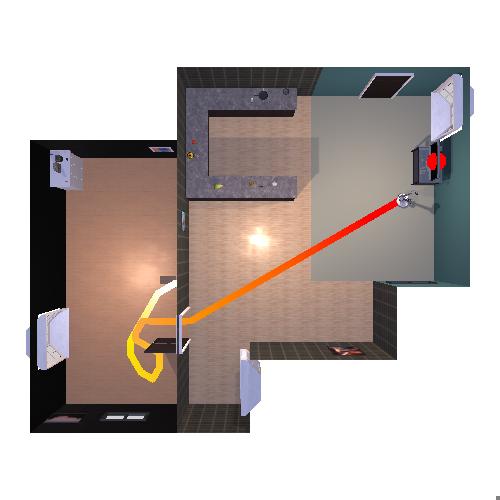
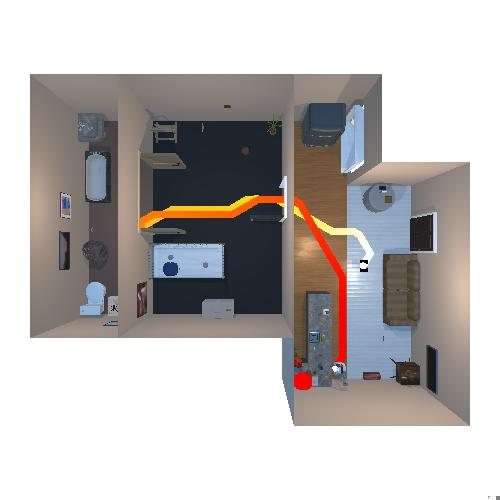
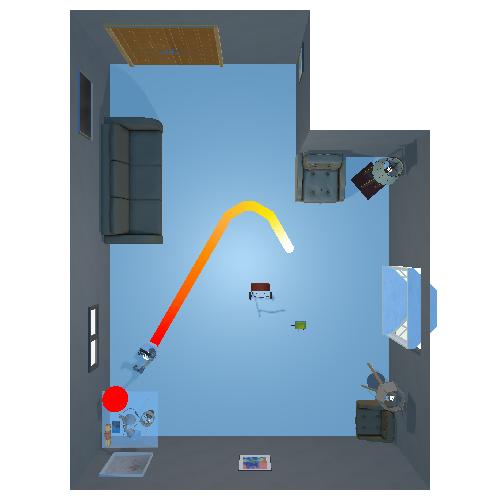
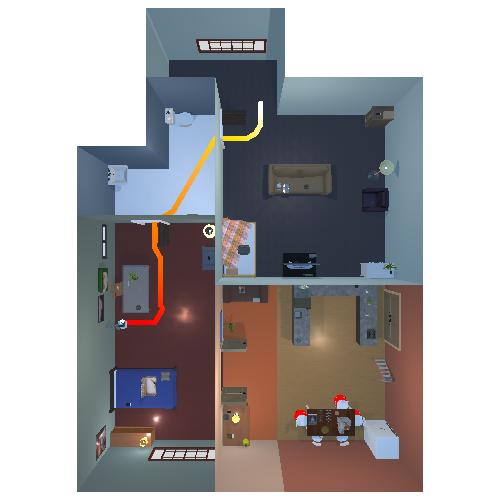
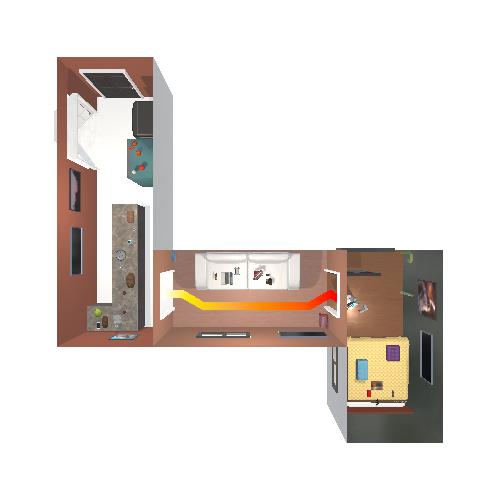
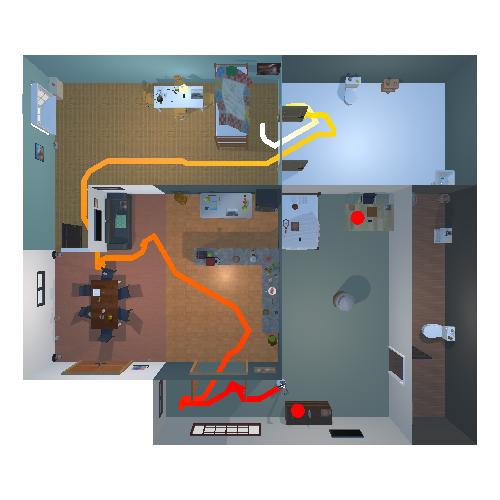
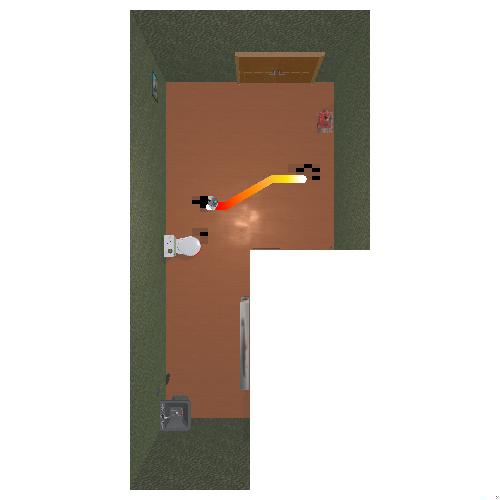
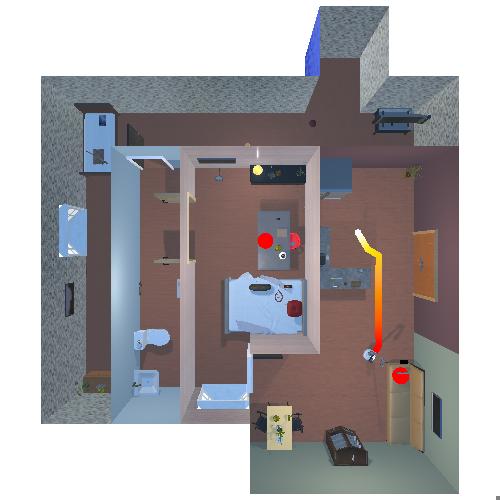
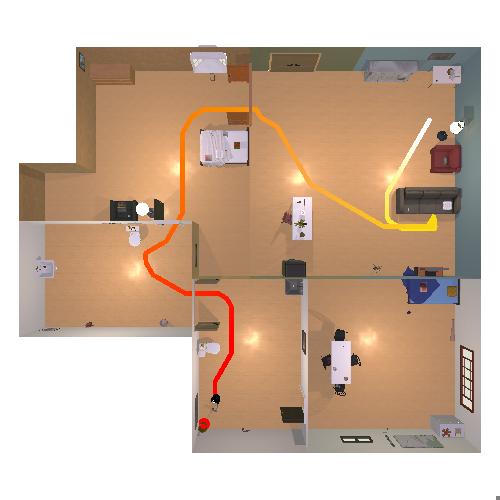
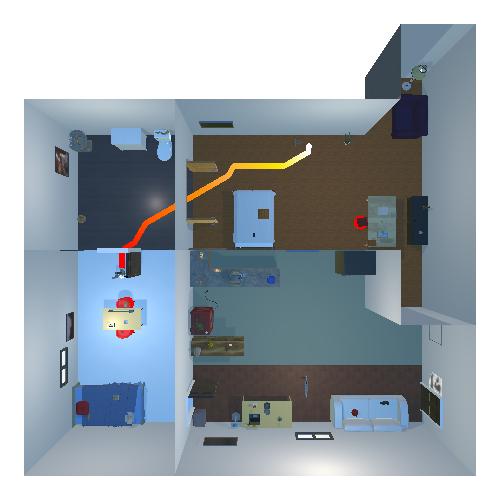
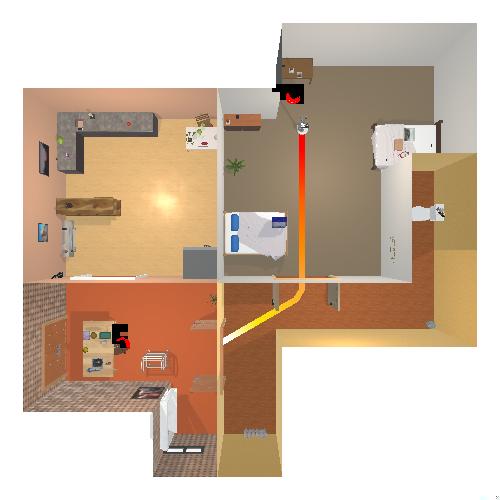
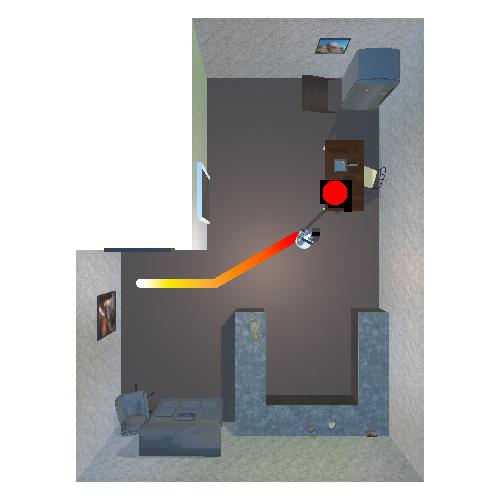
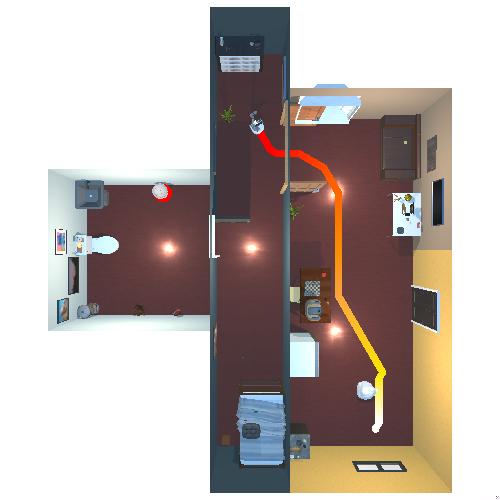
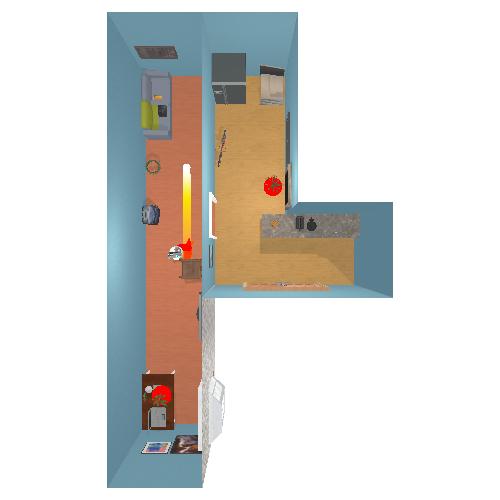
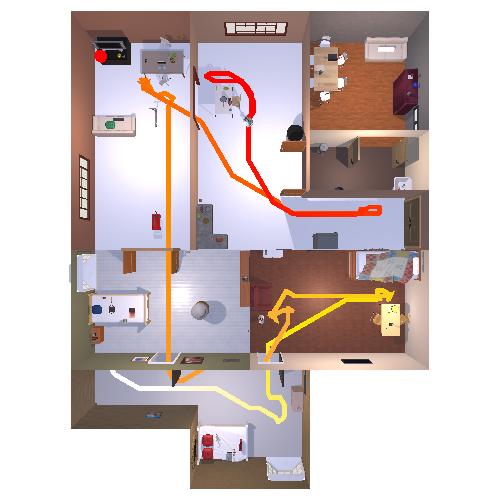
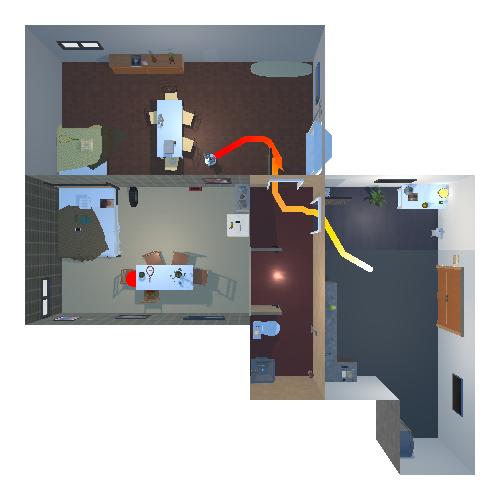
Target: atomizer, success
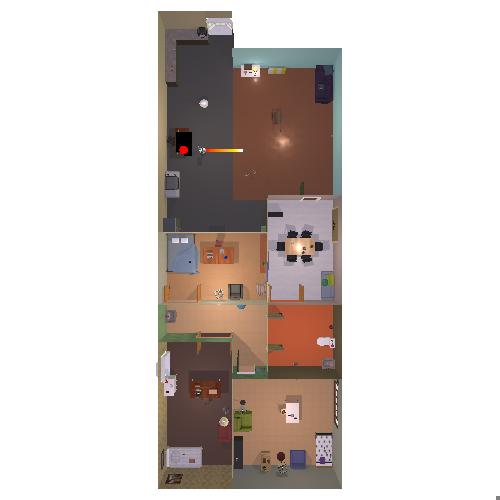
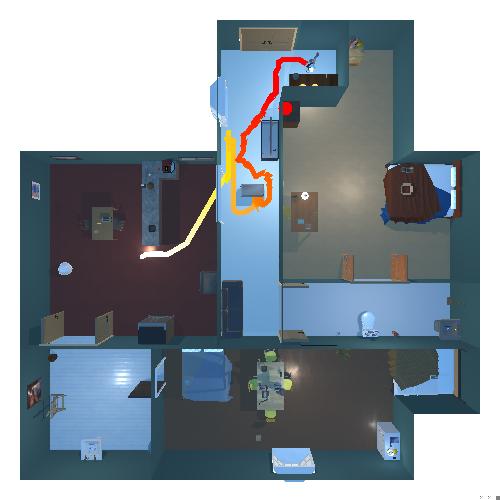
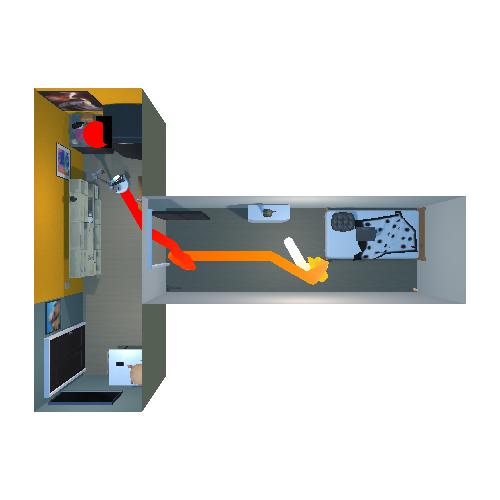
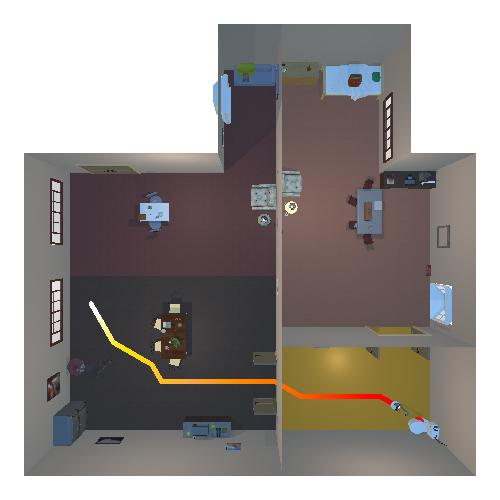
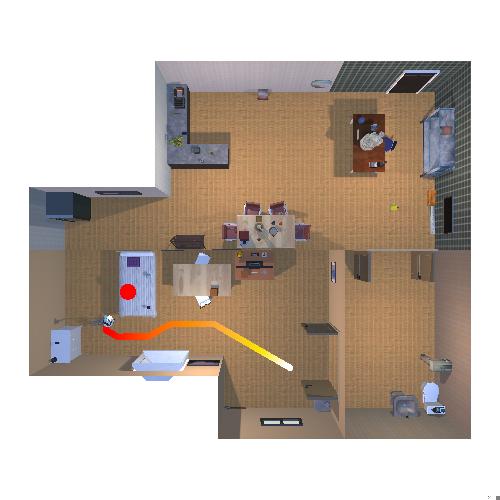
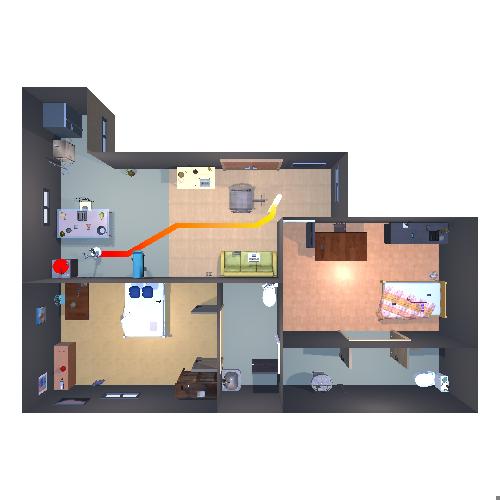
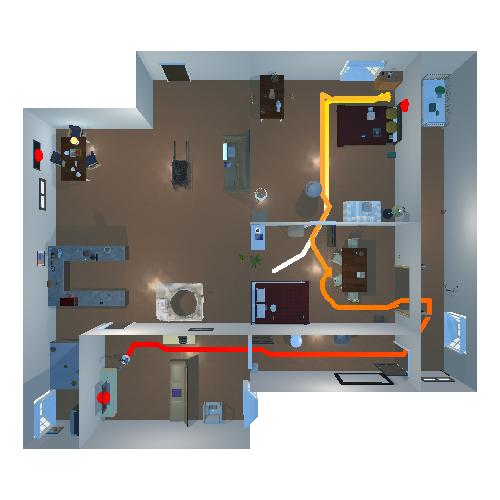
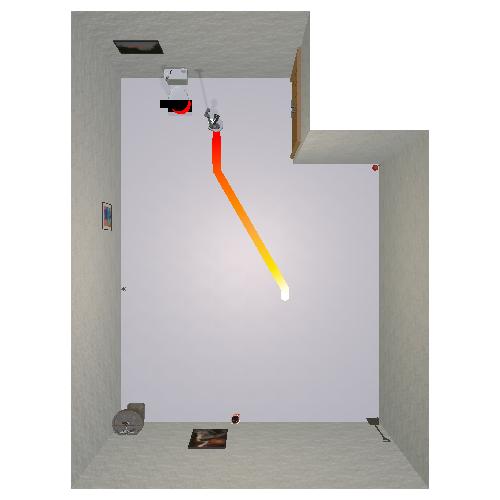
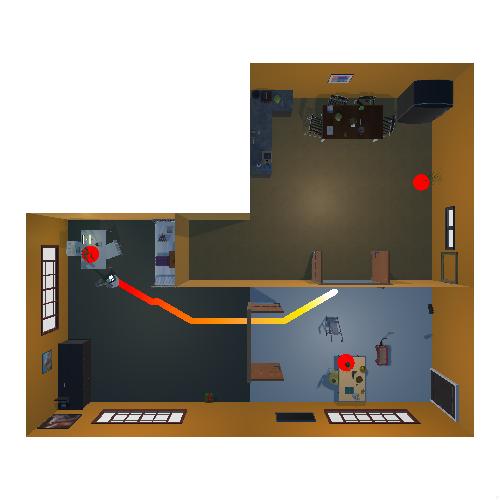
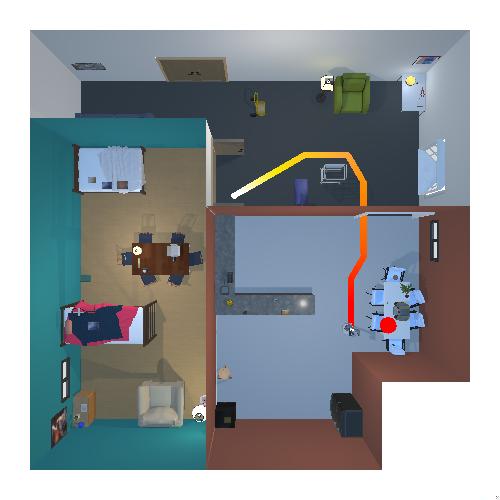
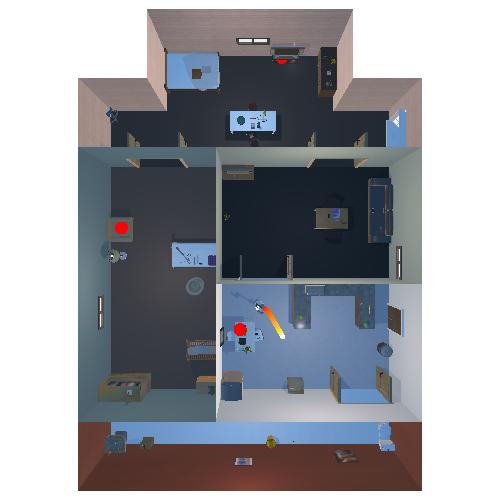
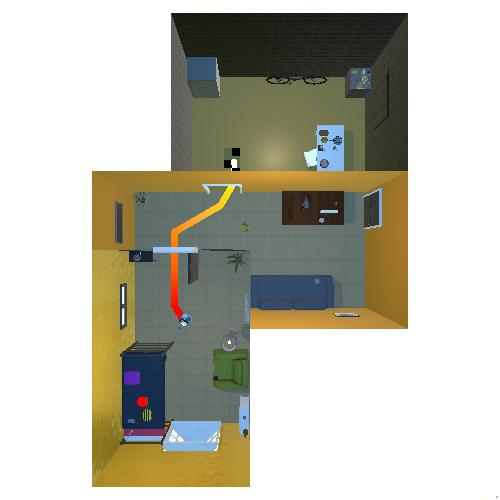
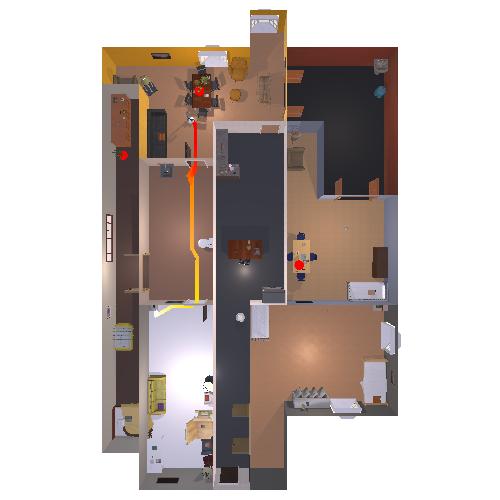
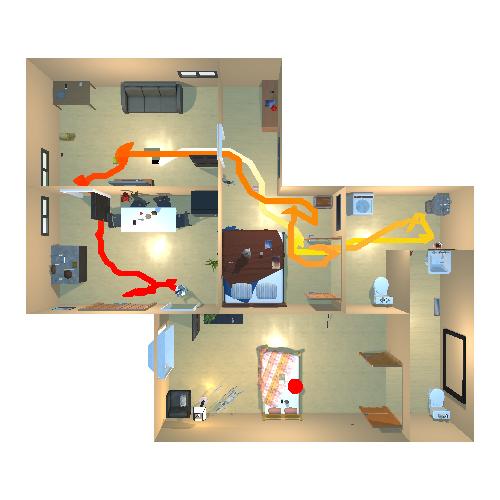
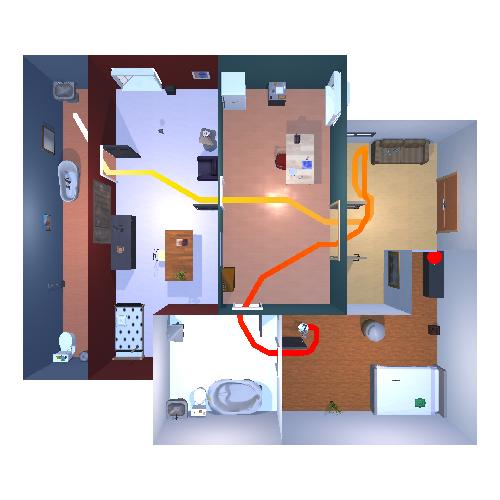
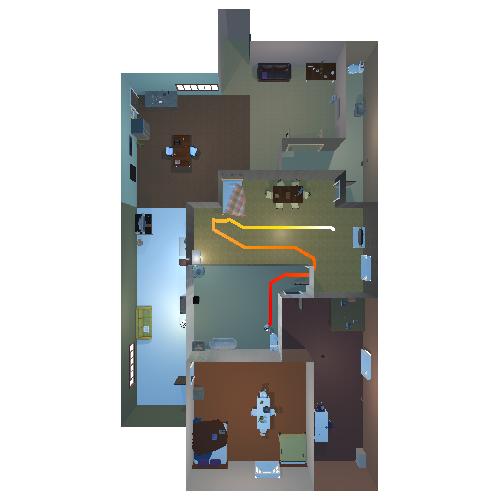
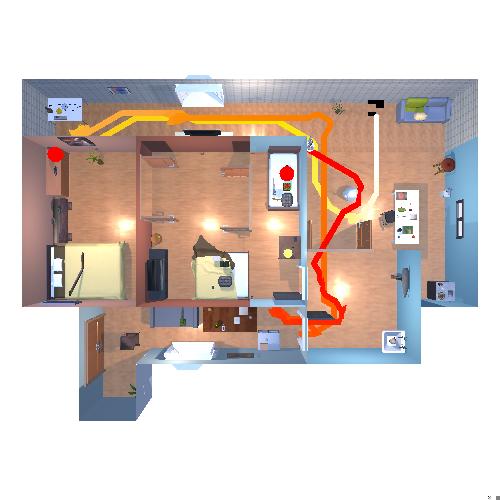
Target: basketball, success
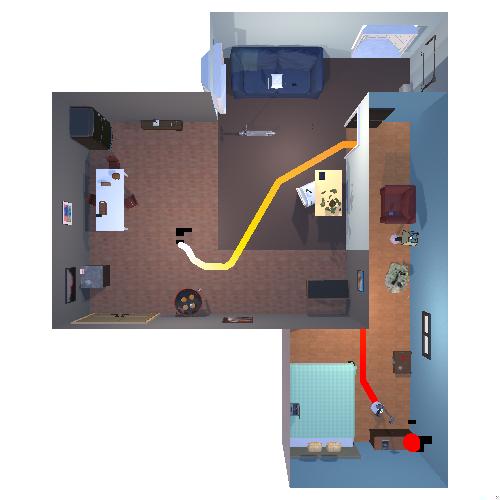
Target: ashcan, success

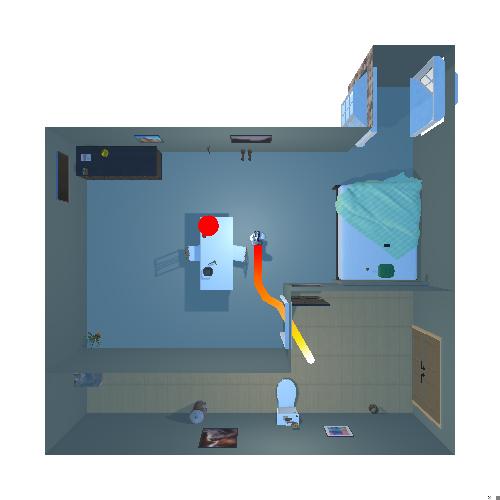
Target: bed, success
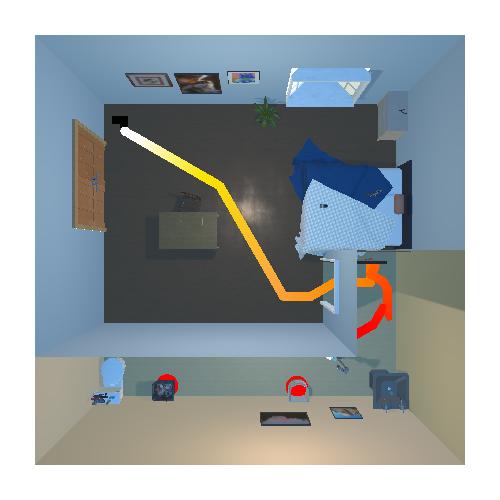
Target: houseplant, success

Target: vase, success
Target: apple, success

Target: atomizer, success

Target: ashcan, success

Target: laptop, success

Target: mug, success
Target: bed, success
Target: television_receiver, success

Target: straight_chair, success

Target: atomizer, success
Target: atomizer, success

Target: ashcan, success
Target: toilet, success

Target: mug, success

Target: bowl, success

Target: ashcan, success
Target: basketball, success
Target: television_receiver, success
Target: laptop, success
Target: straight_chair, success

Target: atomizer, success

Target: vase, success
Target: bed, success
Target: bowl, success

Target: bed, success

Target: straight_chair, success
Target: mug, success
Target: laptop, success
Target: toilet, success

Target: bed, success

Target: houseplant, success
Target: bowl, success
Target: toilet, success

Target: sofa, success

Target: vase, success
Target: laptop, success

Target: television_receiver, success

Target: sofa, success

Target: basketball, success

Target: television_receiver, success
Target: toilet, success
Target: straight_chair, success
Target: basketball, success

Target: bed, success

Target: laptop, success
Target: toilet, success
Target: bowl, success
Target: mug, success
Target: ashcan, success

Target: vase, success

Target: sofa, success
Target: bed, success

Target: atomizer, success
Target: alarm_clock, success

Target: houseplant, success

Target: straight_chair, success

Target: straight_chair, success
Target: toilet, success
Target: ashcan, success

Target: laptop, success
Target: atomizer, success
Target: houseplant, success

Target: laptop, success

Target: houseplant, success
Target: bed, success

Target: houseplant, success
Target: apple, success

Target: straight_chair, success

Target: bowl, success

Target: bed, success
Target: atomizer, success
Target: houseplant, success

Target: straight_chair, success

Target: television_receiver, success

Target: sofa, success

Target: bowl, success
Target: houseplant, success

Target: alarm_clock, success
Target: atomizer, success
Target: sofa, success
Target: television_receiver, success

Target: atomizer, success

Target: atomizer, success

Target: vase, success
Target: alarm_clock, success

Target: mug, success

Target: sofa, success

Target: ashcan, success
Target: television_receiver, success

Target: sofa, success
Target: television_receiver, success
Target: toilet, success

Target: television_receiver, success
Target: toilet, success

Target: sofa, success

Target: apple, success
Target: toilet, success
Target: apple, success
Target: alarm_clock, success

Target: straight_chair, success
Target: laptop, success
Target: houseplant, success
Target: mug, success

Target: bowl, success
Target: apple, success
Target: ashcan, success
Target: apple, success
Target: atomizer, success
Target: television_receiver, success

Target: vase, success
Target: straight_chair, success

Target: toilet, success

Target: basketball, success

Target: houseplant, success

Target: apple, success

Target: television_receiver, success

Target: atomizer, success
Target: bowl, success

Target: toilet, success

Target: straight_chair, success

Target: sofa, success
Target: laptop, success
Target: straight_chair, success
Target: straight_chair, success
Target: bed, success

Target: toilet, success
Target: houseplant, success

Target: bed, success
Target: laptop, success

Target: laptop, success
Target: bed, success

Target: apple, success

Target: bowl, success
Target: television_receiver, success
Target: bowl, success

Target: mug, success
Target: mug, success

Target: sofa, success
Target: sofa, success

Target: ashcan, success
Target: ashcan, success
Target: mug, success
Target: vase, success

Target: alarm_clock, success
Target: bowl, success

Target: sofa, success
Target: houseplant, success
Target: toilet, success

Target: laptop, success
Target: apple, failure

Target: alarm_clock, failure

Target: apple, failure

Target: bowl, failure
Target: ashcan, failure
Target: basketball, failure
Target: television_receiver, failure

Target: ashcan, failure

Target: vase, failure

Target: mug, failure

Target: bed, failure
Target: alarm_clock, failure
Target: houseplant, failure

Target: apple, failure

Target: mug, failure

Target: laptop, failure
Target: basketball, failure
Target: vase, failure
Target: alarm_clock, failure

Target: mug, failure

Target: sofa, failure

Target: ashcan, failure

Target: alarm_clock, failure
Target: bowl, failure

Target: alarm_clock, failure
Target: sofa, failure

Target: basketball, failure
Target: alarm_clock, failure
Target: vase, failure
Target: mug, failure
Target: basketball, failure
Target: vase, failure
Target: ashcan, failure
Target: houseplant, failure
Target: alarm_clock, failure

Target: alarm_clock, failure
Target: alarm_clock, failure
Target: toilet, failure
Target: atomizer, failure

Target: straight_chair, failure

Target: vase, failure

Target: apple, failure
Target: apple, failure